| Q |
エンドランはあまり聞かない会社名ですが? |
| A |
EndRun TechnologiesはGPS周波数標準器の開発では最も長い経験を持つ技術者の集団により、最高性能の周波数標準器を提供するために1998年に創立. 同社の技術者の名前は,学会論文でもよく目にされることでしょう. EndRun の技術者は数々の世界初を達成してきました;
- 1983年に世界初のマイクロプロセッサー制御によるディシプリン周波数標準器を開発
- 1988年に世界初のデジタル温度補償による水晶とルビジウムの周波数標準器を開発
- 1991年に世界初のGPS/Loran-Cによるディシプリン周波数標準器を開発
- 1995年に世界初となる,外部セシウム周波数標準器をディシプリン可能なGPSタイミング受信機の開発とイリジウム通信衛星網への適用
- 1997年に世界初となる,GPS P(Y)-Codeを使用する軍用タイミング受信機の開発
- 2000年に世界初となる,時刻と周波数標準用のCDMA受信機の開発
- 2018年に世界初となる,RTIC Real Time Ionospheric Correction の開発
|
Q |
GPSロールオーバーの日以外にインターナルロールオーバーが生ずると聞きました.EndRun製品にも対策は必要ですか?
|
A |
結論から先にお話しすると,EndRunのGPS製品ではロールオーバーにより運用に支障が生ずることは将来に渡りありません。
そもそもこの問題は,他社製品に採用された不完全なロールオーバー対策の設計に由来します. 多くの GPS 受信機はそのファームウェア更新日をGPS週番号から現在の日付時刻を算出するのに使います.これは GPS 受信機のファームウェアを1024週以上更新せずにおくと日時が遡及する可能性があることを意味します.実際,1度目のロールオーバーを迎えた際に,多くの GPS 同期製品がこの問題を経験しました.にもかかわらず,今もロールオーバー問題を生ずる製品が多く存在します.これら製品も GPS 受信機のファーウェアを更新すれば問題を回避できますが,すでに製造元がサポートを打ち切ったために更新できず,遡及が生じてしまう製品が存在します.
EndRunのGPS製品は従来から独自のロールオーバー対策を実装しており,たとえファームウェアを更新しなかったとしても通常の運用をしている限りロールオーバー問題を生じません.しかし,セキュリティー上の理由などもありますのでファームウェアは常に最新の状態に保つことをお奨めします. EndRun の最新ファームウェアは特別な契約が無くても,いつでも無償でダウンロードしていただけます.
|
Q |
GPSの週番号がロールオーバーすると聞きました.対策は必要ですか?
|
A |
Meridian II と Tycho II は EndRun 独自のGPS受信機とロールオーバー対策を内蔵しており、GPS週番号ロールオーバーの影響を受けません.詳しくはこちらのフィールドサービスブレテンをお読みください. |
Q |
うるう秒はなくなるのですか? |
A |
2022年のCGPMにおいて,UT1とUTCとの差の上限値を2035年までに大きくすることが決まり,2023年12月のITUの無線通信部門でも同様な議決がなされたため,実質うるう秒の挿入や削除は行われなくなりました.これまで地球の自転を基準とするUT1と電子時計を基準とするUTCとのあいだに0.9秒を越える差が生ずるとうるう秒による調整をUTCに行う宣言をIERSがしてきました.
|
Q |
ファームウェアを更新したら SNMP で監視している項目の値が変わってしまいましたが? |
A |
Linux Subsystem (Root File System) 6010-0067-000 ファームウェアを V3.40以降に更新した場合,OID番号の割り付けが変わっている項目があります.SNMP 監視系にお使いいただいている MIB ファイルを更新していただく必要があります.新しい MIB ファイルはファームウェアを更新した Meridian II の以下の場所にあります.
/usr/local/share/snmp/mibs/MERIDIAN2-MIB.txt (1U サイズ Meridian II)
/usr/local/share/snmp/mibs/MERIDIAN22U-MIB.txt (2U サイズ Meridian II)
またこの変更に伴い、gpsFaultStatus と gpsFault2Status,gpsReceiverFaultStatus と gpsReceiverFault2Status オブジェクトをお使いの場合,さらに HP5071 セシウム制御オプションに関連する gpsHP5071AOperStatus,
gpsHP5071AOper2Status,
gpsHP5071AQuesData オブジェクトをお使いの場合は,MIB名を含めてオブジェクト情報が変更になっております. MIB ファイル内の説明をお読みの上,対応いただきますようお願いいたします.こちらも合わせてお読みください. |
Q |
なにか変なのですがどこに問い合わせればよいですか? |
A |
ご迷惑をおかけし申し訳ございません. 症状と本体に前面パネルに貼付したラベル上の情報,具体的な症状と連絡先を is@shoshin.co.jp までご連絡ください.折り返し弊社よりご連絡いたします. 前面パネルを操作して Receiver の Status を見ると GPS の受信状況(AGC と平均 C/No)が表示されます. AGC が130以下,平均C/No値が45dB程度であることを確認下さい.また,本体が内蔵するWebサーバーにアクセスしてすることで,運用状態を確認できます. 不具合の原因は本体ではなくアンテナ系に見つかることがままあります. 屋上の工事の都合で知らないうちにアンテナに事故が発生していることがあるためです.また,GPSアンテナの近くに設置された送信系のシステム(例:携帯基地局、衛星地上局)や,近隣を走る違法無線を搭載した車両からの影響を受けることがあります,
一時的なアンテナ事故による受信障害と復旧の例 (Meridian II の内蔵するウェブ管理の画面 GPS Receiver Stats より):
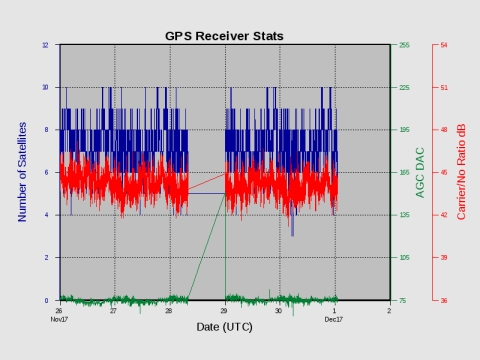
もしログイン可能でしたら,電源再投入をする前にファイルの内容を取得しておくことをおすすめします.症状によりますが、診断のためにこれらログファイルの一部をお送りいただくことをお願いする場合があります.特に受信障害の診断に役に立つのは praecis0.log, oscctrlstat.log, rcvrstat.log です.この下の項にログの取得方法があります.
|
Q |
ログの取得方法は? |
A |
ログは /logs ディレクトリにファイルにより約1ヶ月分が格納されています.praecis0.log は比較的大きいですが,下記の方法で圧縮アーカイブにするとメールで送れるほど小さな一つのファイルになります..
/logs/cpustat.log
/logs/ntpstat.log ( ntpstat コマンドの結果を40秒毎に記録しています)
/logs/oscctrlstat.log ( oscctrlstat コマンドの結果を30秒毎に記録しています)
/logs/messages.log
/logs/praecis0.log
/logs/rcvrstat.log ( rcvrstat コマンドの結果を30秒毎に記録しています)
/logs/syslog.log
/logs/debug.log
(Meridian II の praecis0.log のフォーマットはここに説明があります)
圧縮アーカイブを作るコマンドは次の通りです:
cd /logs; tar cvfz /tmp/logs.tgz *.log
生成された logs.tgz ファイルをお送り下さい.logs.tgz ファイルは scp 等(Windows PCでは WinSCP など)で取り出すことができます.作業後 /tmp や /logs フォルダの不要になったファイルは消去願います.
手順書はこちらからダウンロード下さい. |
Q |
|
A |
Sonoma はlibsshを使っておらず,影響を受けません.
|
| Q |
EndRunは衛星通信や地上通信の世界で推奨されていると聞きました.他社と何が違うのですか? |
| A |
Meridian II のHS-OCXO と US-OCXO と US-Rb 発振器オプションと LPN モジュールによる高安定性と低位相雑音特性を業界が必要としていたことによります.まだお使いでない場合は,オンリーワンの性能と実績をぜひ評価してください. |
Q |
GPSシミュレータでうるう秒やロールオーバーの試験をしたいのですが注意することはありますか?
|
A |
マニュアルの Appendix J をお読みになってから GPS シミュレータに接続してください.
基本的に,次のことに留意します.
- 過去に戻るシミュレーションを行わない
- GPS シミュレータに接続する前後それぞれに clearalmanac コマンドを実行する
- GPS アンテナを接続する前に resetlastgpswn コマンドを実行する(GPS シミュレータを使った場合にのみ実行すること)
- GPS システムから通知のあった実際にありうるうるう秒を挿入する
- GPS アンテナを接続する前に resetleaphistory を実行する(GPS シミュレータを使った場合にのみ実行すること) |
| Q |
アルマナックとかエフェメリスとはなにですか? |
| A |
GPSでは、複数のGPS衛星を使いGPS受信機の位置を計測して,GPS衛星とGPS受信機との距離を知り,距離から伝達にかかる時間を計算して,GPS衛星から受信した時刻を補正することで正確な時刻を知ります.そのためは,まずどの衛星がGPS受信機の上空にあるか知らねばなりません.アルマナックは各GPS衛星の軌道要素であり,GPS受信機の起動時に受信することで,その時刻ならどの衛星が見えたらどの衛星も見えるはずであるかをおおざっぱに示すことで、GPS衛星の探索に要す時間を短縮します.アルマナックを受信するのには12.5分かかります.エフェメリスはそのGPS衛星の精密な軌道要素であり、その衛星の軌道上の位置を正確に計算するのに使われます.各GPS衛星はアルマナックと自身のエフェメリスを送信(ブロードキャストと呼ぶ)しています. GPS受信機を固定位置で使う場合(Dynamic Mode OFF)は,すでにGPS受信機は自分の正確な位置を知っていますから素早くGPS衛星に同期できます. |
| Q |
|
| A |
航法メッセージとも呼ばれ,各GPS衛星が常時放送しているメッセージであり,アルマナックやエフェメリス,運用情報や時計の精度や閏秒や電離層遅延に関する情報などが含まれています.300ビットのサブフレーム5つを含むフレームが25フレームで37500バイト長のメッセージが構成され, 50bpsで送信されていますから,一回り受信するのに12.5分かかります. |
| Q |
アンテナ系が妥当であるかどうかどのように判断すればよいですか?AGCとC/Noの見方は? |
| A |
空を広く見渡せる場所であればどこにでもGPS受信アンテナを設置できますが,携帯基地局の近くなど送信機の近くや,他の建造物の反射波を受信する可能性のある場所は避けます.アンテナ系の総合利得が妥当かどうかは,AGC(自動利得制御)の数値から推察できます.数字が小さいほうが信号強度が強いことを意味します.AGC値が110以上140以下であることが望ましく,100を下回る場合は総合利得が高すぎる可能性がありますので、中継増幅器が入っている場合は取り除くなどしてみます.AGC値が140を上回る場合は同軸ケーブルを見直すか中継増幅器を挿入するなどアンテナ系の総合利得を上げる対策が必要になります.C/N値は41dB以上43dB程度を保つのが望ましく,40dBを下回ることがある場合はアンテナ系の総合利得を上げる対策が必要になります.また,AGCが100近くなのに C/N が40dBを下回る場合は障害波の影響を受けている可能性があります.
日本国内において、アンテナキットのアンテナ(利得40dB)と同軸ケーブルを使い,空の開けた場所で受信した場合,AGCは110程度,C/Nは
42~45を示します.
例: AGC = 118 C/N = 44.0 dB 良好な受信状態
# gpsstat
LOCKED TFOM = 3 2019 288 07:23:50 18 18 2 6 118 422481 44.0 0000 0000
|
| Q |
|
| A |
アンテナキットのアンテナと同軸ケーブルのみを使った場合、AGCは110程度になります.アンテナキットのアンテナが内蔵するLNAの利得は40dBです.20dBの損失のある同軸ケーブルと組み合わせた場合に AGC は 140程度になります.20dB の損失は,90m の 5D-SFA-LITE 同軸ケーブルの損失に相当します.安定した受信のためにAGC140以上は避けるべきです.アンテナ系の総合利得(アクティブアンテナの利得-伝送路の損失)はできれば30dB程度を維持し,20dBを切ることがないようにします. |
| Q |
GPS衛星(SV)毎のC/Noの通常値はいくつですか? |
| A |
C/Noの値はSVが地平線に近い時にもっとも悪くなり仰角(Elevation) 20度以下では信号は弱く40dB程度を示します.SVの仰角が大きくなるにつれて信号強度も改善し,C/Noも改善して50dBを超えることもあります. |
| Q |
GPS衛星のAve. C/Noの通常値はいくつですか? |
| A |
概ね42~45dB程度を維持するはずです.維持できない場合はアンテナ系の総合利得を上げる対策が必要になります. |
Q |
GPS アンテナの設置位置からは空を広く見晴らすことができず,GPSに同期するのに時間がかかっています.
|
A |
GPSに同期するにはアンテナの位置を正確に測位する必要があり,そのためには4つ以上のGPS衛星を受信し続ける必要があります.GPS衛星の位置は時間と共に変化しますので,長い時間かければ位置評定ができる可能性もありますが,別の方法でアンテナの位置(基準位置の座標と標高)を調べて手入力し,USERモードで運用する方法もあります.手入力した座標と限られたGPS衛星でも NTP に必要とされる精度は十分満たすことが出来ます.手入力の方法はこちらを参照ください.
しかし、Meridian II や Tycho II を周波数標準や時刻標準としてお使いになるのであれば,空を広く見渡せる場所にアンテナを設置して常に複数の衛星から安定した信号を受信できるようにする必要があります. |
| Q |
校正は必要ないのですか? |
| A |
Meridian II 自体を校正することは通常ありません.GPSの提供するNISTに準じたUSNOの基準に同期する機器だからです.Meridian II は一台毎に二次標準を使い内部遅延校正を行って出荷されますが,付属のアンテナと同軸ケーブルを使うこと前提としており,他のケーブルを使用する際は遅延補正を行う必要があります. さらに時刻の絶対精度が求められる場合には,アンテナの設置位置,アンテナ系の遅延を含めた比較校正を行うことがありますが、その際に使われる基準もGPSに同期するものです.Meridian II は一台一台,NISTに準ずる社内標準との間で精度を確認した上出荷されます.Tycho IIにおいてもオプションとしてこの作業を追加できます.また高精度な絶対時刻を必要とする用途には EndRun 独自の電離層遅延測定と補正を行う RTIC オプションを推奨します. |
Q |
時刻は何を基準にしていますか? |
A |
UTC は各国の時刻標準機関が管理する数百台の原子時計の加重平均に基づいて国際度量衡機関 BIPM が算出しており、それら機間の間は1/10ナノ秒の精度で互いに比較されてナノ秒単位の誤差に管理されています. GPS 時刻は常に UTC 加重平均寄与率最上位にある米国 USNO の UTC 時刻に同期しており,Meridian II/Tycho II はその GPS 時刻に同期します. UTC 管理については日本の NICT の説明も参照ください.
|
| Q |
誤操作を防ぐために,操作パネルのないシンプルなものがほしいのですが? |
| A |
Meridian IIの操作パネルは設定により操作を禁止できます. 操作表示パネルそのものが必要ない用途には Tycho II をお使いください.操作パネルが省かれているほかは,基本的に Meridian II と同じ性能と機能を持っています.ただし,Meridian IIでは標準となっている NIST との誤差確認がオプション設定になっています. |
| Q |
ラボに使うので,1PPS と IRIG と NTP タイムサーバー と PTP グランドマスタークロックの機能も備えた周波数標準がほしいのですが? |
| A |
Meridian II は標準機能として NTP と AM-IRIG をサポートします.またオプションとして 本格的な IEEE1588/PTP や各種シリアルタイムコードも提供できます.周波数標準の機能とタイムサーバーの機能は別々のプロセッサーが処理しており、互いに影響することはありません. |
| Q |
IRIGや1PPSや10MHz信号の分配器は用意されていますか? |
| A |
位相雑音の劣化を最小限にした周波数信号分配器 FDC3302e,位相差を監視するパルス信号分配器 PDC3301e,AM-IRIG 信号分配器 TDC3303e を用意しています. すべてMeridian II/Tycho IIのアラーム信号による入力切換やSNMPでの監視操作が可能になります. |
Q |
GPSに同期するまでIRIGやシリアルタイムが配信する時刻はどうなりますか?
1PPS信号はどうですか?
|
A |
シリアルタイム出力は,GPSに同期するまで時刻のデータフィールドをヌルにして送信します.
IRIGと1PPSは setinhibitoutputsmode コマンドの設定に従います. ON の場合、GPS同期するまで IRIG と 1PPS は出力されません.詳しくはマニュアルを参照ください. |
Q |
NMEAは出力できますか?
|
A |
シリアルタイム出力オプションを指定していただくことで NMEA-0183 V3.01 に従った GGA, GLL, GSA, RMC, VTG, ZDA のうち任意の3つのセンテンスを出力します.連続して送信される最大3つのセンテンスの先頭の文字 $ の始まりがオンタイムとなり,1PPSから20ns以内に送信されます.UTC時刻を含むのは ZDA センテンスです.GGA センテンスの時刻は最後の測位の時刻であり,過去の時刻です.電源投入からGPSに同期するまでZDAセンテンスの時刻データフィールドをヌルにして送信します.3つのメッセージは1PPSから500msの間に送信を終えます(9600bpsでは500msに達することはありません). |
| Q |
CDMA 同期のモデルもあるのですか? |
| A |
高精度周波数標準としての本来の能力を得るには、GPS 受信アンテナの工事を行い、GPS 同期モデルの Meridian II や Tycho II をお使いください。 |
| Q |
GPSアンテナ系の遅延の補正はどうするのですか? |
| A |
出荷時に標準添付されるアンテナと同軸ケーブルを使った場合の遅延補正値は 62ns です. setcaldelay コマンドで設定します. アンテナケーブルを別途長タスした場合や分配器や増幅器を含むGPS信号分配ネットワークを使用する場合はその遅延値に応じた補正値を入力します.詳しくはマニュアルの Appendix E - Installing the GPS Antenna, Calibrate Your Receiver をお読みいただくか、弊社までお問い合わせください.遅延量を計測したアンテナケーブルも用意できます.お問い合わせください. |
| Q |
Meridian II と Tycho II でなぜ UTC に対する同期精度が異なるのですか? |
| A |
Meridian II は標準で工場出荷前に内部遅延校正が行われます. 周波数標準として使われることが多い Tycho II では内部遅延校正は必要ないことから遅延校正はオプションになっています. |
| Q |
GPS アンテナの設置工事はやってもらえるのですか? |
| A |
弊社が直接工事を行うことはありませんが,工事業者を紹介したり,設計審査や監督することはいたします. GPS 受信アンテナやアレスタ、増幅器や分配器は実績ある製品を弊社でも取り扱っております. 正しいアンテナ工事を行うことは,安定した運用に欠かせません. 実際,GPS 周波数標準に起こる障害の多くはアンテナ工事の不手際によるものです. |
| Q |
すでに他社のGPSアンテナが設置されています.共用できますか? |
| A |
適切な分配設計をすれば,多くの場合他社のアンテナを共用できます.ただし、Meridian II は付属するアンテナの遅延を含めて補正が行われていることに留意願います.すなわち,時刻標準として Meridian II をお使いになる際に,他社のアンテナや分配経路の遅延が定かでないアンテナ系を接続した場合は,その遅延が時刻の誤差につながります.周波数標準としてのみお使いになるときはこの限りではありません.詳しくはご相談ください.なお,調査費用が必要になることがあります. |
| Q |
NTP や PTP などのタイムサーバーの機能は無いのですか? |
| A |
MERIDIAN II や Tycho II は EndRun の Sonoma D12 タイムサーバーと同等なNTP機能を標準装備しており, またIEEE1588/PTP機能(オプション)を搭載でき、本格的な高精度タイムサーバーとしてご使用いただけます.タイムサーバーの機能と周波数源の機能は別々のプロセッサーが処理しており、互いに干渉することはありません. |
| Q |
Tycho II には NTP 機能は無いのですか? |
| A |
NTP を搭載しています. PTPオプションも実装できます.Tycho II は Meridian II から前面パネルの表示と操作の機能を除き、UTCとの校正をオプション化した機種です. 衛星通信基地局など、時刻の絶対値校正を必要とせず,シンプルな機器が望ましい場合には Tycho II が望ましい選択肢になります. |
| Q |
MERIDIAN II はオプションが多くて何を注文したら希望を満たせるのかわかわかりません. |
| A |
弊社技術部にお問い合わせいただければ,お客様の用途に最適な構成をご提案いたします.
ENG@shoshin.co.jp まで “MERIDIAN IIの構成について” との表題にて,用途に関する簡単な説明とともにお問い合わせください. |
| Q |
MERIDIAN II を周波数標準として使います.どのオプションがおすすめですか? |
| A |
純粋な 10MHz の正弦波が必要ということでしたら,最適な解はUS-OCXO発振器オプションと低位相雑音出力オプション(4出力)になります.ただ,US-OCXOは高価ですので,要求位相雑音仕様が厳しくない場合には,HS-OCXOやMS-OCXOオプションもお選びいただけます.その際も低位相雑音(LPN)オプションと組み合わせることをおすすめします. ホールドオーバー性能を重視する場合は,低位相雑音な本格的ルビジウムを搭載する US-Rb オプションををおすすめします.US-Rb オプションは 2Uシャーシでのみ提供されます. それぞれの発振器オプションの仕様についてはこちらを参照ください. なおTCXOやUS-RbでないRbオプションは高安定低位相雑音の周波数標準の用途には適していません. |
| Q |
MS-OCXO と HS-OCXO と US-OCXO とではなにが違うのですか? |
| A |
長い経験を持つ信頼できる水晶メーカーの水晶発振子を EndRun 社内で1ヶ月ほどかけて安定度を選別し,使い分けています. その中でも特に安定性に優れた発振子が超低雑音特性をサポートする回路と組み合わされて US-OCXO になります.いずれも周波数ステップを生じない OCXO です. 用途により使い分けください. それぞれの発振器オプションの仕様についてはこちらを参照ください. |
| Q |
Rb とUS-Rb はなにが違うのですか? |
| A |
ともに長寿命のルビジウムを利用していることは同じですが,設計の主旨と内蔵するルビジウムランプと水晶発振器が大きく異なります. Rb 発振器オプションは 1U シャーシに収まるコンパクトなルビジウムユニットです. 2U シャーシに用意されている US-Rb は本格的なルビジウムランプと低位相雑音特性に優れた水晶発振子を備えたユニットです. 用途により使い分けください. それぞれの発振器オプションの仕様についてはこちらを参照ください. |
| Q | 衛星地上局の周波数源として使います.どのオプションがおすすめですか? |
| A | 上記の基準発振器の選択を適切に行うと共に,監視システムや冗長化分配器への接続のためにAlarmオプション(オープンコレクタ)を加えてください.
通常,この用途には 2台の Meridian II それぞれに Alarm オプションを加えて、Alarmオプションの出力をFDC3302 周波数分配シャーシ(電源二重化オプション付)に接続した冗長化構成とします.現場での 誤操作を嫌う用途には,全面表示と操作パネルを省略し,絶対時刻校正を省いた Tycho II も用意しています. |
| Q |
ラボの標準周波数源として使います.どのオプションがおすすめですか? |
| A |
上記の発振器の選択を適切に行い、お使いの測定器が必要とする精度と位相雑音性能を備えた信号を供給できる校正とします. データ通信やレーダーなど非常に低い位相雑音を基準周波数源に求める用途が多くなっています。非常に 低い位相雑音特性と高い安定性の US-OCXO と LPN オプションを推奨いたします. また絶対時刻を必要とする用途には高精度な電離層遅延補正を行う RTIC オプションを推奨します. |
| Q |
Meridian II (Tycho II) を二台使用した周波数標準の冗長構成を構成したいと考えています.切換器は用意されていますか? |
| A |
高性能低位相雑音 FDC3302 2入力周波数分配機 を用意しています.Meridian II /Tycho II の周波数信号のレベルを監視して自動的に切り換えることもできますが、Meridian II にアラームオプションを加えて FDC3302 のアラーム入力に接続することをおすすめします. FDC3302e のネットワークオプションは SNMP による管理制御を可能にします.パルス信号には PDC,AM-IRIG には TDC が用意されています. |
| Q | ルビジウム発振器と水晶発振器とではどちらがおすすめですか? |
| A |
低位相雑音の周波数標準としては高品位な水晶発振器が最高の特性を示します.ルビジウム発振器にも水晶発振器が含まれており,その位相雑音特性が発振器としての位相雑音を決めます. 小型のルビジウム発振器は中期安定性に優れますが位相雑音(短期安定性)に難があり,そのまま周波数シンセサイザの周波数基準として使うことはまれです. 低位相雑音を求めるのであれば位相雑音特性に配慮して選別した高品位水晶発振子を持つ OCXO を使うべきです. EndRun の Meridian II と US-OCXO は,選び抜かれた優れた低位相雑音特性(短期安定性)とGPS同期による中長期高安定性を提供します. 用途によっては HS-OCXO も十分な位相雑音性能を持ちます.こちらをお読みください.
また EndRun では本格的なルビジウムと高品位低位相雑音な OCXO を備えた US-Rb オプションを Meridian II 2U に用意しています. 低位相雑音とホールドオーバー性能を重視する用途には US-Rb オプションをお使いください. 詳しくはお気軽にお問い合わせください.
基準発振器オプションデータシート |
| Q |
衛星通信用に他社の周波数標準を使用していますが位相ノイズと周波数ステップの問題に悩まされています。何か提案できる解決策はありませんか? |
| A |
EndRunのMeridian II かTycho II の採用を検討ください. 周波数ステップを生じない,位相雑音の少ない周波数標準として,通信用基準周波数標準器として広く民間および防衛用途に採用されています. |
| Q | 低位相雑音がどうして重要なのですか? |
| A |
PLL発振器はPLL逓倍器であり,基準周波数に対して搬送波周波数が高くなればなるほど,基準周波数に含まれる位相雑音が大きく逓倍されてしまいます. 従って搬送波周波数が高くなればなるほど基準周波数に含まれる位相雑音(ジッター)は小さいことが求められます.
こちらをお読みください. |
| Q |
US-OCXO の良好な位相雑音特性はどのように実現しているのですか? |
| A |
EndRun社の主要エンジニアは GPS 周波数標準器に関して業界でも最も長い経験を有しており、特にディシプリンオシレーターに関しては草分け的存在です.US-OCXO は特に高い搬送波周波数を使う衛星通信業界の要請に応えるべく EndRun が独自に開発した低位相雑音の OCXO であり,水晶発振子の選択選別から回路構成,オーブン構造にまで長年培ってきた技術が惜しみなく投入された製品です. EndRun の OCXO は全て社内製造されています. ぜひ評価試験されることをおすすめいたします. |
| Q |
US-OCXO の発振子は BVA ですか? |
| A |
いいえ,特殊な構造を持つ BVA ではありません. もっとも歴史のある水晶製造元から供給される高品質な水晶発振子をさらに時間をかけて選別し,実績のある回路と組み合わせた EndRun 社独自の OCXO です. |
| Q |
EndRun の OCXO には周波数ステップが発生しないとしていますが,他社の OCXO でも発生しないのでは? |
| A |
残念ながら他社の OCXO の中には十分なスクリーニングを行わず,周波数ステップを発生するものが見つかっています,一旦発生すると,周波数と位相安定性に依存するシステムの運用に大きな影響を与えます. 不定期なシステム障害の原因として周波数ステップの発生を考慮,排除しておくべきです. EndRun では長期間のスクリーニングを必ず実施して,Frequency Step Free を保証しています. 万が一周波数ステップが発生したことが確認された場合には発振器を交換いたします. |
| Q |
US-OCXO の単品での販売はしていないのですか? |
| A |
単体での販売はしておりません.Meridian II と Tycho II と RT3205 のオプションとして設定されています. |
| Q |
LPN 低位相ノイズオプションの1, 5, 10MHzの出力はコヒーレントですか? |
| A | いいえ,それぞれ別のフィルターを通るため位相は一致していません. |
| Q | アドバンテスト R3031の代わりに使えますか? |
| A |
R3031が発生する次の信号の内,Meridian IIは赤字の信号を発生できます: 1.544MHz 2.048MHz 3.58MHz 5MHz 6.312MHz 27MHz 155.52MHz 64kHz + 8kHz + 0.4kHz または 64kHz + 8kHz |
| Q | ITU-T G.811/823/824 ITU-T G.703に対応できますか? |
| A |
テレコムクロック出力オプションとオシレータオプション(OCXOないしRb)の選択により対応します. TCXOはテレコムクロックオップションに対応しません. |
| Q |
どこの会社の GPS 受信機を使っているのですか? |
| A |
EndRun が独自に開発したタイミング専用 GPS 受信機を使っています. EndRunの GPS 受信機はコード疑似距離測定に加えて搬送波位相測定も行い高精度なタイミング計測を行います. これにより、独自のアルゴリズムによる RTIC オプションの搭載による セシウム周波数標準 なみの安定度や強固なエラー排除が可能になりました. 最近実際に生じたGPS衛星の運用上の問題も含めて、太陽嵐による電離層遅延誤差変動の補正排除など,誤差の要因となる事象に対してよりインテリジェントにリアルタイムに対応できるようになり,高い精度と安定性の維持が可能になっています. この技術は EndRun 独自のものです. |
| Q | MERIDIAN IIのオプションスロットはどのように使うのですか? |
| A | 5つのオプションスロットが用意されています.1番スロットは発振器専用です。低位相雑音分配器はこのスロットを発振器と共用できます。2番目から5番目のスロットは自由に使うことができます.たとえば4出力DCLSタイムコード出力モジュールを4つ実装することで16のDCLS出力を持たせることができます。スロット毎に別機能のモジュールを実装することも可能です。冗長化電源モジュールは4番と5番スロットを占有します. |
| Q | 時刻標準と周波数標準について学ぶには |
| A | ぜひこちらをお読みください
http://tf.nist.gov/general/pdf/1498.pdf |
| Q |
ルビジウムには寿命があるのですか? |
| A |
ルビジウム発振器にはルビジウムランプの寿命があり,10年から15年ほどで交換が必要になります. US-Rb はルビジウム量の多い本格的なランプを使用しており,コンパクト Rb に比べて長い寿命と安定性が期待できます. |
| Q |
消耗部品はないのですか? |
| A |
EndRun の製品は低消費電力化により空冷ファンがなく,基本的に消耗部品がありません. 低消費電力な設計により発熱が少なく,部品のストレスも小さくなっています. 設置したら忘れてしまってよいほのど高い信頼性を誇ります. |
| Q | Meridian II は Meridian とどこが違うのですか? |
| A |
一見よく似ていますが,あらゆる点でアップグレードされています. |
| Q |
RTIC オプションとは何なのですか? |
| A |
GPS衛星と地上の受信者との間には電離層があって,GPS信号が電離層を通過する際に遅延が生じて,受信する時刻精度に影響を与えます.これを L1 単一周波数受信機において補正するために,GPS衛星からは補正量の予測値が放送されています.しかし,それはあくまでも予測値であり,太陽活動により刻々と変化する実際の値とは異なるため,誤差を補正しきることはできません. RTIC は電離層遅延量を実測することでリアルタイムに補正を行う EndRun 独自の機能です.太陽嵐の影響を受けない高精度で高安定な周波数標準を実現し,比類無い安定度と精度を高価な2周波は受信機を使うこと無く実現します.他の関連項目も参照ください. |
| Q |
GPS は太陽フレアによる影響を受けると聞いたのですが? |
| A |
太陽フレアとCME噴出物の地球到来による電離層の外乱はGPSタイミングに影響を与えます.その影響はマイクロ秒以下(数十ナノ秒)ですので,タイムサーバーの用途では無視できますが,厳密な絶対時刻を必要とする用途には影響を与えることがあります. Meridian II と Tycho II に用意されたRTIC(Real Time Ionospheric Correction リアルタイム電離層遅延補正)オプションは,コストのかかる二周波数GPS測定による電離層遅延補正を L1 単一周波数GPS受信機で行い,太陽嵐の影響を受けない高精度で高安定な周波数標準を実現しています.下の項目を参照ください。 |
| Q |
セシウムなみの高い安定性が必要なのですが? |
| A |
Meridian II と Tycho II に用意された RTIC(Real Time Ionospheric Correction)オプションは,二周波数GPS測定による補正を行うことなく, L1 単一周波数 GPS 受信機でありながら高精度な電離層遅延補正をリアルタイムに行います.太陽フレアとCME到来による電離層遅延の外乱にも有効です. GPS 同期時における安定性と精度は、 RTIC により大幅に改善され,RTIC オプションを US-OCXO 発振器オプションと組み合わせることにより Meridian II と Tycho II の精度と安定性は,はるかに高価で保守費用のかかる 5071A セシウム標準+クリーンアップ発振器の安定性をあらゆる測定間隔で匹敵ないし上回ります.詳しくはお問い合わせください. |
| Q |
セシウム標準器の代替を考えています |
| A |
Meridian II ないし Tycho II + US-OCXO 発振器オプション + RTIC オプションを検討ください.低い導入運用コストで同等以上の安定度と精度を達成します. |
| Q |
5071A セシウム標準のGPS同期に使えますか? |
| A |
5071A コントロールモジュールをオプションとして用意しており,これにより5071Aセシウム標準をUTS/USNOのタイムスケールに同期させることができます.お問い合わせください. |
| Q | 監視にSNMPは使えますか? |
| A |
はい,ポーリングとトラップに対応します.本体の /user/local/share/snmp/mibs にMIBがあります.
例:Linux (net-snmp) から snmp ポーリング Antenna 故障とその原因(アンテナ開放)の検出
故障ステータスを得る(例:GPSアンテナ故障)
$ snmpget -c Meridian2 -v 2c -m /usr/share/snmp/mibs/MERIDIAN2-MIB.txt 192.168.0.97 gpsFaultNibble2Status.0
MERIDIAN2-MIB::gpsFaultNibble2Status.0 = BITS: 80 gpsAntennaFlt(0)
GPS受信機のエラーを得る(例:アンテナ開放=アンテナに給電できていない)
$ snmpget -c Meridian2 -v 2c -m /usr/share/snmp/mibs/MERIDIAN2-MIB.txt 192.168.0.97 gpsReceiverFaultNibble2Status.0
MERIDIAN2-MIB::gpsReceiverFaultNibble2Status.0 = BITS: 20 gpsAntennaOpen(2)
例:Linux (net-snmp) から snmp ポーリング 精度を知る
TFOM 値(NTPの時刻精度予測値)を得る
$
snmpget -c Meridian2 -v 2c -m /usr/share/snmp/mibs/MERIDIAN2-MIB.txt 192.168.0.127 gntpTimeFigureOfMerit.0
MERIDIAN2-MIB::gntpTimeFigureOfMerit.0 = INTEGER: lessthan100ns(3)
基準発振器の精度測定値を得る
$ snmpget -c Meridian2 -v 2c -m /usr/share/snmp/mibs/MERIDIAN2-MIB.txt 192.168.0.61 gpsEstimatedTimeError.0
MERIDIAN2-MIB::gpsEstimatedTimeError.0 = STRING: +1.01000e-09 s
基準発振器の予測精度得る(COAST中の精度予測値)
$ snmpget -c Meridian2 -v 2c -m /usr/share/snmp/mibs/MERIDIAN2-MIB.txt 192.168.0.61 gpsMeasuredTimeError.0
MERIDIAN2-MIB::gpsMeasuredTimeError.0 = STRING: -1.18435e-09 s
こちらから Meridian II の snmpwalk の例をご覧いただけます. |
| Q | 導入する前にMIBを入手できますか? |
| A | はい,弊社までお問い合わせください. |
Q |
static route を追加できますか? |
A |
/etc/rc.d/rc.M に route -add net 行を追加することでスタティックルートを追加できます.このプロダクトノートを参照ください.
routeコマンドについては route -h と man route で表示されるマニュアルページを参照ください. また,以下に参考例を示します;
IPv4
例: 1番目のポート eth0 にIPv4のサブネット 192.168.222.0/24 へゲートウェイ 192.168.0.5 を経由するのスタティックルートを経由するを設定する(eth1やIPv6も同様な方法で設定できます)(複数経路がなければ metric は省略可)
/sbin/route add -net 192.168.222.0/24 gw 192.168.0.5 metric 1 eth0
(192.168.222.0/255.255.255.0のネットワークへはeth0 からゲートウェイ192.168.0.5を経由する)
/sbin/route でスタティックルートが作られたことを確認します
表示例: 192.168.222.0 192.168.0.5 255.255.255.0 UG 0 0 0 eth0
再起動時にもスタティックルートが作られるようにするには以下の手順を実行します
-
既にIPアドレスが設定されており,DHCPサーバからネットワークパラメータを設定していないことを確認します.
-
シリアルコンソールないしsshでユニットにログインし, root に su します
-
手入力でスタティックルートを設定します
/etc/rc.d/rc.M をエディタで開きます
手入力で試したのと同じコマンド行を /boot/etc/rc.d/rc.M に加えます
追加する行は,/etc/rc.d/rc.Mにある次のバナー行の直後に書きます.
################################################################
# ATTENTION #
# This is where you should add any IP aliases or static routes, #
# before the various daemons are started... #
#################################################################
例 : 1番目のポート eth0 にIPv4のスタティックルートを設定する
/sbin/route add -net 192.168.222.0/24 gw 192.168.0.5 eth0
-
- cp -p /etc/rc.d/rc.M /boot/etc/rc.d して不揮発フォルダに保存します.
-
変更を有効にするには reboot コマンドでユニットを再起動します(同上コマンドを直接実行していない場合)
-
再度ユニットにログインし,rootにsuしてrouteコマンドを使い,設定されたことを確認します
route の出力がわかりづらい場合は route -n します
注意:netconfig コマンドを実行したり,フロントパネルの操作でIPアドレスやゲートウェイを変更した場合は,上記設定手順を再度繰り返す必要があります
IPv6
基本的にIPv4と同じ手順です.routeコマンドにデフォールトで付いているコマンドオプション -A inet を -A inet6 に置き換えてください。
ルートの表示
/sbin/route -A inet6
ルートの追加
/sbin/route -A inet6 add 2001:268:111::/64 gw 2001:268:347::2 eth0
ルートの削除
/sbin/route -A inet6 del 2001:268:111::/64 gw 2001:268:347::2 eth0
詳しくは route -h で表示されるヘルプと man route をお読みください. |
| Q |
|
| A |
|
| Q |
|
| A |
|
| Q |
|
| A |
|


