| Jackson Labs Technologies : Claw GPS シミュレータ | |
| 情報システム営業部 - Jackson Labs Technologies - GPSシミュレータ - シミュレーション例3no1 -お問い合わせ-資料請求 フォーム |
|
|

シミュレーション例 3 : 移動シミュレーション(モーション) |
| Motion Command Language で書かれた移動プログラムを実行します |
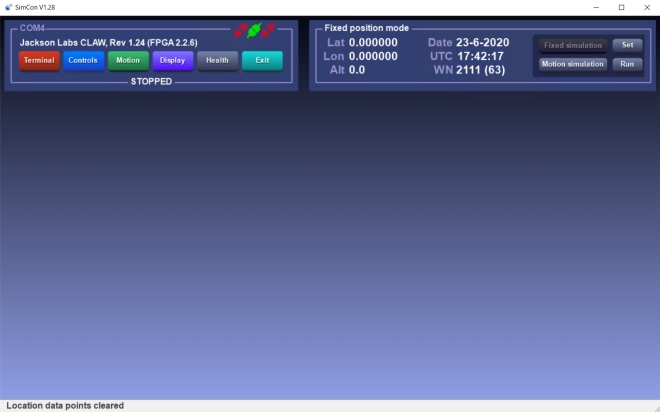
このシミュレーションでは、GPS 受信機の位置が移動する Motion simulation を実行します。 これとは別に GPS 受信機が固定する Fixed simulation (シミュレーション例 1) があります。 Motion Command Language で書かれたMotionプログラムのサンプルが north_las_vegas.txt として SimCon ソフトウェアパッケージに含まれています。 移動プログラムのサンプルファイルは C:\ユーザー\パブリック\パブリックのドキュメント\Jackson Labs\SimCon\Examples\Motion programs にあります(PCにより異なる場合があります)。 その座標を変更して浜松空港一周にしたのが以下のMotionプログラムです。 SIM:POS:MOTION:WRITE 1, DYN, 100.000, 10.000, 500.000, 98.067, 10.000 Motion Command Language (MCL) については、マニュアルの 6.3.29 に詳しい説明があります。 MCL ではシミュレーション中の動きを、現在地、力学的制限値、加減速、加加速度、昇降、指示方位で表します。結果、指定した制限範囲内の加速度で方向 や高度を変えながら移動します。 それぞれのコマンドは以下の通りです。 DYNamics (6.3.29.1) は全ての動きに影響しますから最初の行に書きます。書式と単位は: REFerence (6.3.29.2) は始点、速度、方向 を指定します。書式と単位は; STRaight (6.3.29.3) は進行方位を保った水平飛行の時間と直線コースか大圏コースを指定します。書式と単位は: ACCELerate (6.3.29.4) は期間と速度の変化分を指定します。書式と単位は: CLIMB (6.3.29.6) は現在の進行方位と速度からの上昇ないし下降を指定します。書式と単位は: TURN (6.3.29.5) は現在の水平速度における進行方位の変更と横方向の加速度を指定します。書式と単位は: HALT (6.3.29.10) は現在の速度と進行方向からDYNコマンドで指定した制限内で到達する到達点です。書式と単位は: GOTO (6.3.29.11) は指定する行番号にジャンプすることで、無限ループを作ります。書式は: END (6.3.29.12) は Motion Command のシーケンスの終わり指定します。書式は: この例には使われていない、加速とターンの組み合わせ ACCEL-TURN や、ターンと上昇の組み合わせ TURN-CLIMBや、通過点を指定する Waypoint WAYPT が用意されています。 SimCon を起動します2つのヘッダーが表示されています。 SimCon は最後の設定を覚えていて、起動時に最後の状態を復元します。 左側にある5つのボタンで各機能パネルにアクセスします。 5つのパネルを同時に表示できます。 Exit ボタンで終了します。 暗い色のボタンはその機能パネルが有効になっていることを意味します。 右側のヘッダーはステータスヘッダーと呼ばれ、その表示内容は状態により変化します。 以下の状態では、どの機能パネルも選択されておらず、SimCom は COM4 で Claw GPS シミュレーター に接続しており、シミュレーションは STOPPED すなわち停止しています。 |
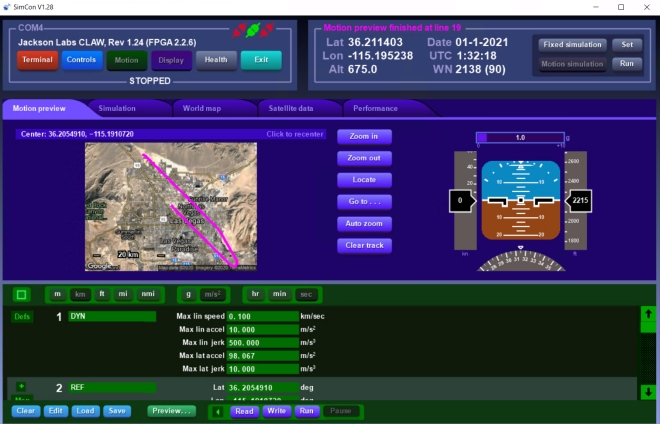
Motion ボタンをクリック、Motion プログラムを LoadMotion パネルが表示されます。 Motion パネルの Load ボタンをクリックして、上記 north_las_vegas.txt ファイルを選択して「開く」ボタンをクリックすると Motion Command Language で書かれたプログラムが読み込まれます。 あるいは、Edit ボタンをクリックして表示されたメモ帳の中身を Motion プログラムで書き換え、Ctrl-S で保存する方法でも Load できます。 読み込まれたプログラムを、Motion パネルで一覧したり変更したりできます。 このパネルを使いゼロから Motion をプログラムすることもできます。 インターネットに接続していると、Display パネルに地図が表示されます。 Display ボタンをクリック、Motion preview の実行Display パネルが表示されますので、Motion preview タブをクリックします。 プログラムをプリビューしてみます。 時間を節約するために 10x ボタンをクリックして時間を10倍速にし、Start ボタンをクリックします。 この時点では Claw GPS シミュレータは動作していません。
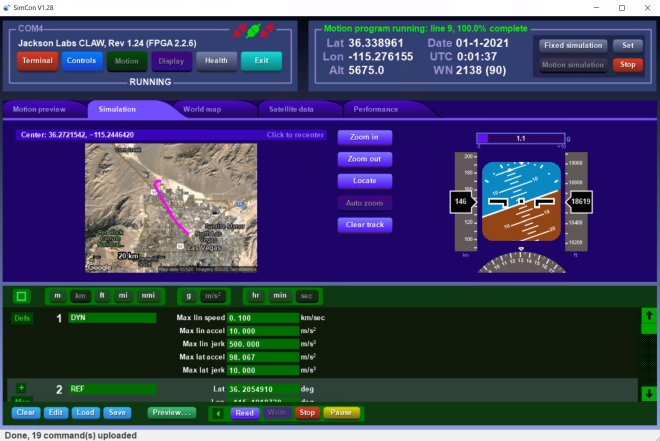
Claw GPS シミュレーターにプログラムを書き込むMotion パネルの下にある Simulator ボタンをクリックします。 Motion パネルの下にある Write ボタンをクリックします。 アップロードが始まり、しばらくすると Done, 19 command(s) uploaded と表示されます。
シミュレーションの実行開始日時は Control パネルで設定します。 シミュレーション例1を参照してください。 Motion パネルの下にある Run ボタンをクリックするとシミュレーションが始まり、Display パネルは Simulation タブに切り替わります。 Display パネルの Locate ボタンと Auto zoom ボタンをクリックしておくと軌跡を見ることができます。 MFD も動作します。
Motion Command Language を使い、任意の移動経路を設定し、任意の日時のシミュレーションを実行できます。 以上 |


お問い合わせはこちらまで
株式会社 昌新 産業機器営業部
関連製品: GPS 周波数標準とタイムサーバー
関連製品: GPS 信号分配器
関連製品: 光ファイバー GPS 信号延長器